JUMP TO TOPIC
This article aims to shed light on the derivative of secant inverse, exploring its fundamental properties, applications, and the inherent elegance it brings to mathematical analysis. So, let us embark on this mathematical journey and delve into the depths of the derivative of secant inverse to uncover its hidden treasures.
Defining The Derivative of Secant Inverse
The derivative of secant inverse represents the rate of change of the $sec^{-1}$ function with respect to its input variable.
If we look at a function f(x) = $sec-1(x)$, where $sec-1(x)$ is the inverse of the secant function, the derivative of f(x) with respect to x is formally referred to as the derivative of secant inverse. It measures how the x variable’s variation affects the output of the $sec-1$ function.
For the analysis and solution of issues involving inverse trigonometric functions, the derivative of secant inverse is an essential mathematical tool. It also enables us to investigate the behaviour and characteristics of the secant inverse function in a variety of contexts, including mathematics, physics, and engineering.
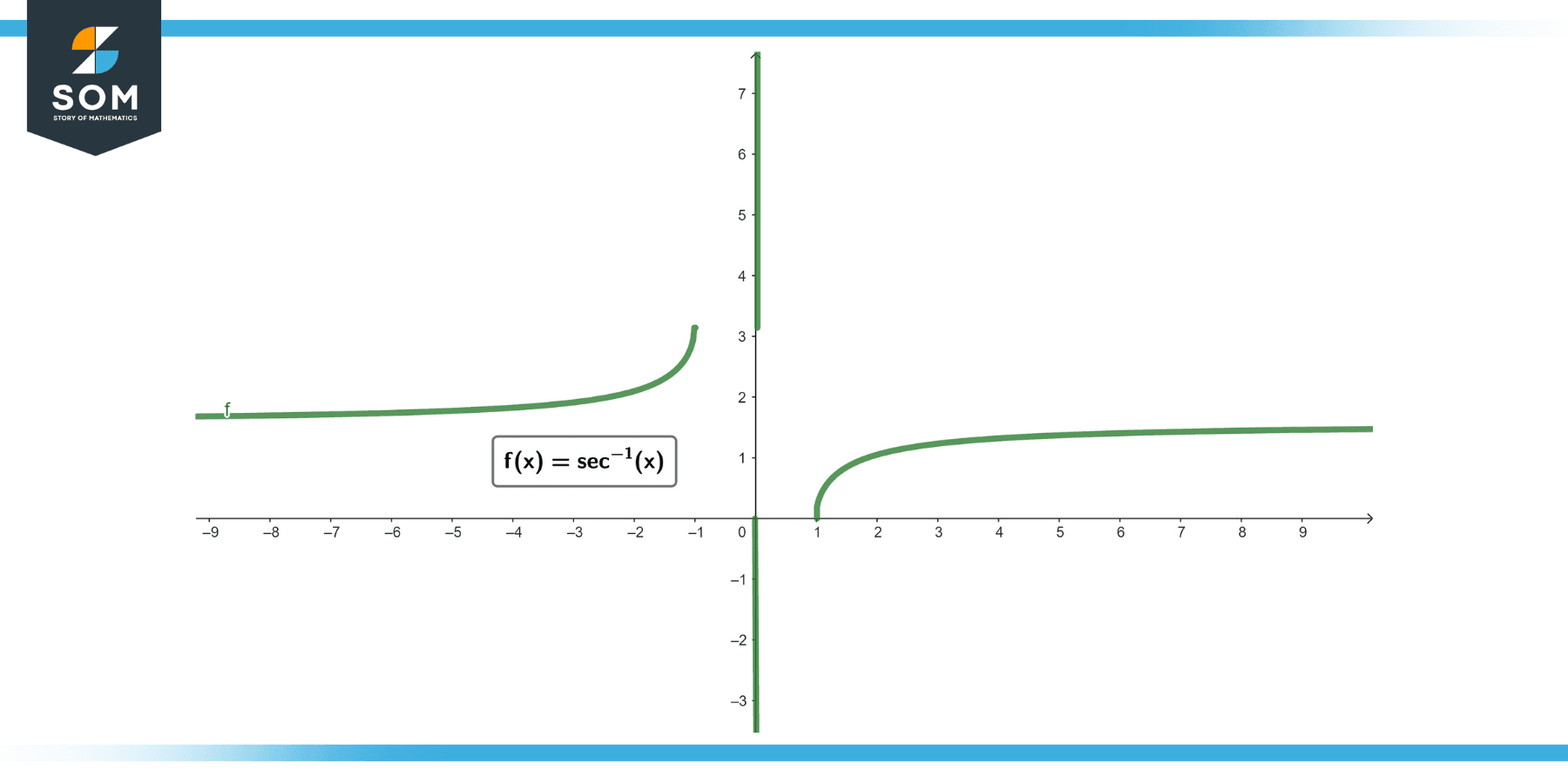
Figure-1.
Properties of Derivative of Secant Inverse
Here are the properties of the derivative of secant inverse explained in detail:
Domain and Range
The derivative of secant inverse is defined for a specific domain. The function $sec^{-1}(x)$ itself is defined for x ∈ (-∞, -1] ∪ [1, +∞), excluding the values where x = 0. Consequently, the derivative of secant inverse is defined for the same domain as the secant inverse function.
Differentiability
The derivative of secant inverse is differentiable for its domain. However, it is important to note that the secant inverse function itself is not differentiable at the points where its value equals ±∞. This means that the derivative of secant inverse will also be non-differentiable at those particular points.
Formula
The derivative of secant inverse can be expressed using calculus notation as d/dx ($sec^{-1}(x)$). To find the derivative, we use the inverse trigonometric identity d/dx ($sec^{-1}(x)$) = 1 / (|x|√($x^2$ – 1)). It’s important to note that this formula works for x ∈ (-∞, -1) and x ∈ (1, +∞).
Positive and Negative Values
The derivative of secant inverse can be positive or negative depending on the value of x. When x > 1, the derivative is positive, indicating an increasing slope. Conversely, when x < -1, the derivative is negative, representing a decreasing slope. These signs are a consequence of the square root term in the derivative formula.
Asymptotic Behavior
The derivative of secant inverse approaches zero as x approaches ±∞. This implies that the rate of change of the secant inverse function becomes smaller and smaller as the input variable moves towards infinity or negative infinity.
Critical Points
The derivative of secant inverse has critical points at x = ±1. At these points, the derivative is undefined (since the denominator of the derivative formula becomes zero), which corresponds to the vertical asymptotes of the secant inverse function.
Applications
The derivative of secant inverse finds application in various mathematical and scientific fields. It is utilized in calculus to solve problems involving rates of change, optimization, and integration. In physics and engineering, the derivative of secant inverse helps analyze systems with angular measurements and plays a role in fields like optics, mechanics, and control systems.
Understanding the properties of the derivative of secant inverse allows us to comprehend the behavior of the secant inverse function and apply it to solve problems across different disciplines. Mathematicians, physicists, and engineers can better understand the nuances of inverse trigonometric functions and their applications by making use of these qualities.
Ralevent Formulas
Here are the related formulas for the derivative of secant inverse explained in detail:
Using the Inverse Trigonometric Identity
The derivative of secant inverse can be derived using the inverse trigonometric identity that relates the derivative of an inverse trigonometric function to the function itself. Specifically, for the secant inverse function, the identity is:
d/dx ($sec^{-1}(x)$) = 1 / (|x|√(x² – 1))
Here, d/dx denotes the derivative with respect to x. The formula holds true for x ∈ (-∞, -1) and x ∈ (1, +∞), excluding the values where x = 0.
Simplifying the Formula
To simplify the formula further, we can manipulate it by using algebraic techniques. The derivative formula can be rewritten as:
d/dx ($sec^{-1}(x)$) = ±1 / (|x|√(x² – 1))
Note that the positive or negative sign depends on the interval of x. For x > 1, the positive sign is used when x > 1 and the negative sign when x < -1. This is because the secant inverse function is positive in the interval (1, +∞) and negative in the interval (-∞, -1).
Derivative at x = 1 and x = -1
At the critical points x = 1 and x = -1, the derivative formula becomes undefined, as the denominator becomes zero. This aligns with the vertical asymptotes of the secant inverse function.
Simplifying Further
The derivative formula can be further simplified by factoring out |x| from the denominator, resulting in:
d/dx ($sec^{-1}(x)$) = ±1 / (|x|√(x² – 1))
d/dx ($sec^{-1}(x)$) = ±1 / (|x| ∙ |√(x² – 1)|)
d/dx ($sec^{-1}(x)$) = ±1 / (|x| ∙ √|x² – 1|)
This form highlights the relationship between the derivative of secant inverse and the absolute value of x, as well as the absolute value of the square root of (x² – 1).
Alternative NotationsIn some mathematical contexts, different notations may be used to represent the derivative of secant inverse. Some common alternative notations include $d/dx (sec^(-1)(x))$ and d/dx (asec(x)).
Understanding and utilizing these formulas for the derivative of secant inverse allows for the analysis of the rate of change and behavior of the secant inverse function in various mathematical and scientific applications. Inverse trigonometric functions, optimization, integration, and other issues in mathematics and physics can all be solved with the use of these formulas.
Exercise
Example 1
Find the derivative of 𝑓(𝑥) = $sec^{-1}(2x)$.
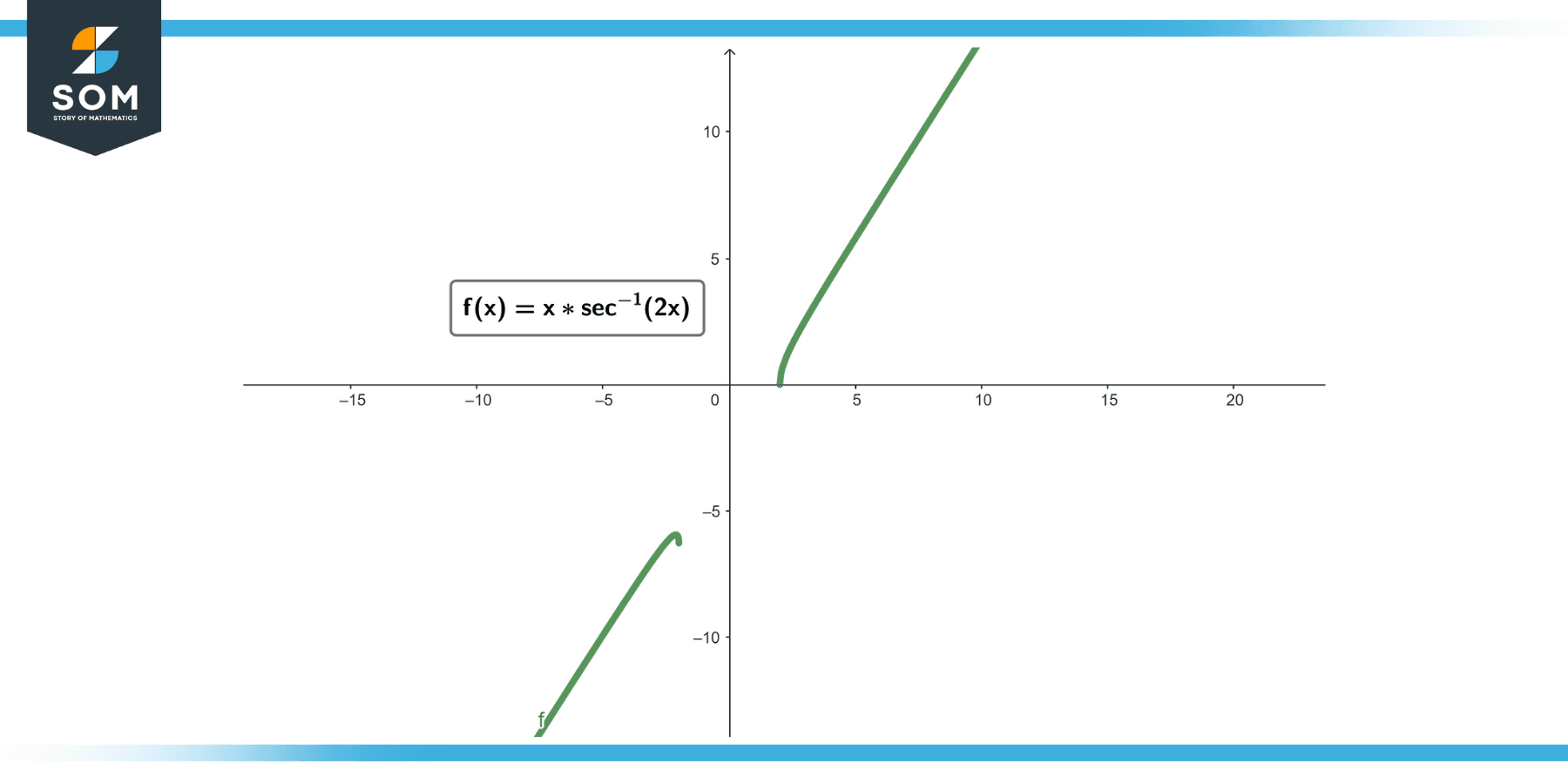
Figure-2.
Solution
To find the derivative of 𝑓(𝑥), we apply the chain rule. Let 𝑢 = 2𝑥. Then, 𝑓(𝑥) = $sec^{-1}(u)$. Using the derivative formula, we have:
𝑓'(𝑥) = d/d𝑥 ($sec^{-1}(u)$)
𝑓'(𝑥) = 1 / (|𝑢|√(𝑢² – 1))
Substituting back 𝑢 = 2𝑥:
𝑓'(𝑥) = 1 / (|2𝑥|√((2𝑥)² – 1))
𝑓'(𝑥) = 1 / (|2𝑥|√(4𝑥² – 1))
Thus, the derivative of 𝑓(𝑥) = $sec^{-1}(2x)$ is 𝑓'(𝑥) = 1 / (|2𝑥|√(4𝑥² – 1)).
Example 2
Find the derivative of 𝑔(𝑥) = $sec^{-1}(5𝑥 + 3)$.
Solution
Similar to the previous example, we apply the chain rule. Let 𝑢 = 5𝑥 + 3. Then, 𝑔(𝑥) = $sec^{-1}(u)$. Using the derivative formula, we have:
𝑔'(𝑥) = d/d𝑥 ($sec^{-1}(u)$)
𝑔'(𝑥) = 1 / (|𝑢|√(𝑢² – 1))
Substituting back 𝑢 = 5𝑥 + 3:
𝑔'(𝑥) = 1 / (|5𝑥 + 3|√((5𝑥 + 3)² – 1))
Therefore, the derivative of 𝑔(𝑥) = $sec^{-1}(5𝑥 + 3)$ is 𝑔'(𝑥) = 1 / (|5𝑥 + 3|√((5𝑥 + 3)² – 1)).
Example 3
Find the derivative of ℎ(𝑥) = $sec^{-1}(𝑥²)$.
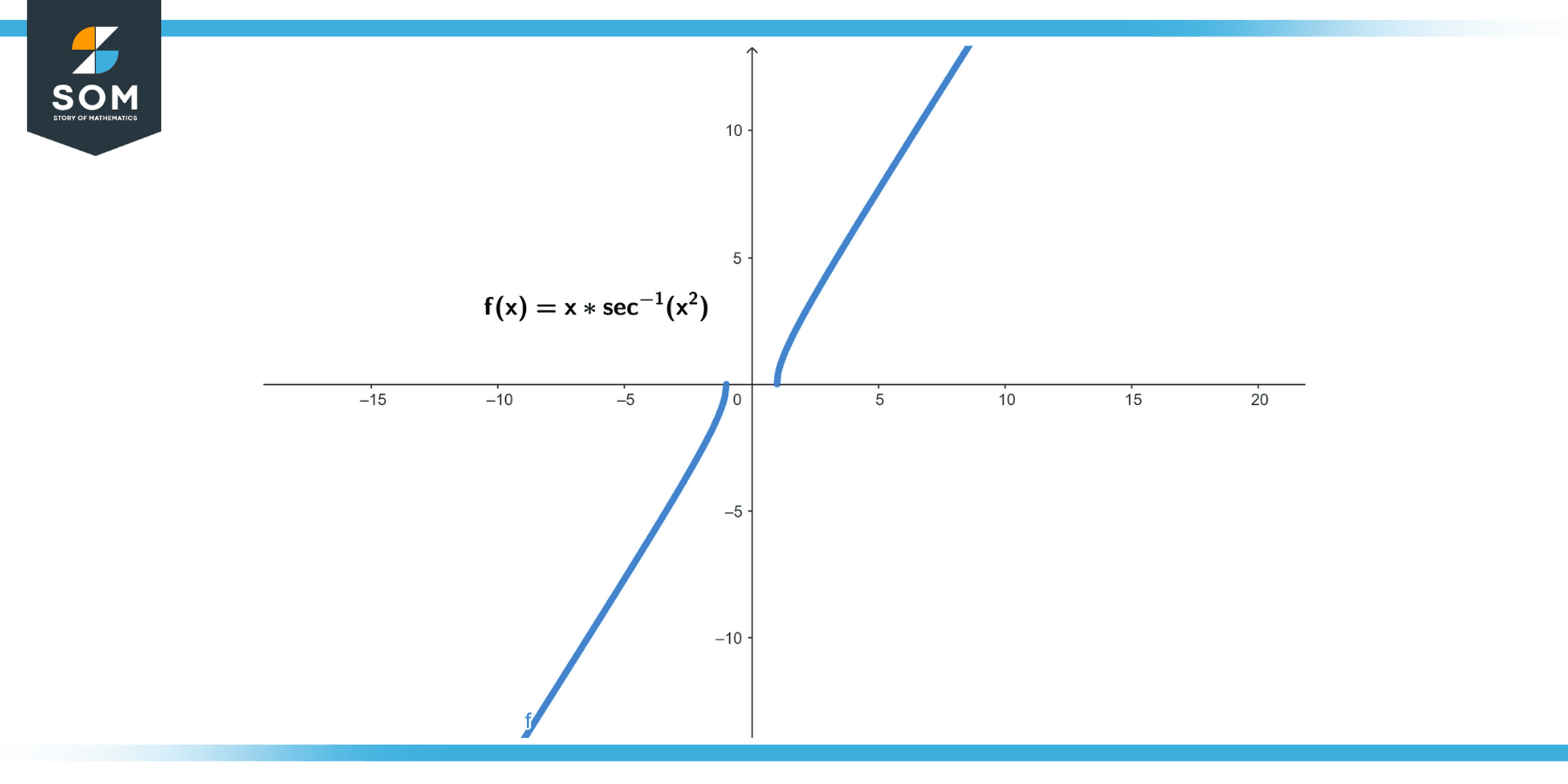
Figure-3.
Solution
To differentiate ℎ(𝑥), we again apply the chain rule. Let 𝑢 = 𝑥². Then, ℎ(𝑥) = $sec^{-1}(u)$. Using the derivative formula, we have:
ℎ'(𝑥) = d/d𝑥 ($sec^{-1}(u)$)
ℎ'(𝑥) = 1 / (|𝑢|√(𝑢² – 1))
Substituting back 𝑢 = 𝑥²:
ℎ'(𝑥) = 1 / (|𝑥²|√((𝑥²)² – 1))
ℎ'(𝑥) = 1 / (|𝑥²|√(𝑥⁴ – 1))
Thus, the derivative of ℎ(𝑥) = $sec^{-1}(𝑥²)$ is ℎ'(𝑥) = 1 / (|𝑥²|√(𝑥⁴ – 1)).
Example 4
Find the derivative of 𝑘(𝑥) = $sec^{-1}(3 / 𝑥)$.
Solution
Using the chain rule, we let 𝑢 = 3 / 𝑥. Then, 𝑘(𝑥) = $sec^{-1}(u)$. Applying the derivative formula, we have:
𝑘'(𝑥) = d/d𝑥 ($sec^{-1}(u)$)
𝑘'(𝑥) = 1 / (|𝑢|√(𝑢² – 1))
Substituting back 𝑢 = 3 / 𝑥:
𝑘'(𝑥) = 1 / (|3 / 𝑥|√((3 / 𝑥)² – 1))
𝑘'(𝑥) = 1 / (|3 / 𝑥|√((9 / 𝑥²) – 1))
𝑘'(𝑥) = 𝑥 / (3√(9 – 𝑥²))
Therefore, the derivative of 𝑘(𝑥) = $sec^{-1}(3 / 𝑥)$ is 𝑘'(𝑥) = 𝑥 / (3√(9 – 𝑥²)).
Example 5
Find the derivative of 𝑚(𝑥) = $sec^{-1}(√𝑥)$.
Solution
To differentiate 𝑚(𝑥), we use the chain rule. Let 𝑢 = √𝑥. Then, 𝑚(𝑥) = $sec^{-1}(u)$. Applying the derivative formula, we have:
𝑚'(𝑥) = d/d𝑥 ($sec^{-1}(u)$)
𝑚'(𝑥) = 1 / (|𝑢|√(𝑢² – 1))
Substituting back 𝑢 = √𝑥:
𝑚'(𝑥) = 1 / (|√𝑥|√((√𝑥)² – 1))
𝑚'(𝑥) = 1 / (|√𝑥|√(𝑥 – 1))
Hence, the derivative of 𝑚(𝑥) = $sec^{-1}(√𝑥)$ is 𝑚'(𝑥) = 1 / (|√𝑥|√(𝑥 – 1)).
Example 6
Find the derivative of 𝑛(𝑥) = $sec^{-1}(2𝑥 – 1) + $sec^{-1}(𝑥²)$.
Solution
To find the derivative of 𝑛(𝑥), we differentiate each term separately and sum the results.
For the first term, let 𝑢 = 2𝑥 – 1. Then, 𝑛(𝑥) = $sec^{-1}(u)$. Applying the derivative formula, we have:
𝑛'(𝑥) = d/d𝑥 ($sec^{-1}(u)$)
𝑚'(𝑥) = 1 / (|𝑢|√(𝑢² – 1))
Substituting back 𝑢 = 2𝑥 – 1:
𝑛'(𝑥) = 1 / (|2𝑥 – 1|√((2𝑥 – 1)² – 1))
For the second term, let 𝑣 = 𝑥². Then, 𝑛(𝑥) = $sec^{-1}(v)$. Using the derivative formula, we have:
𝑛'(𝑥) = d/d𝑥 ($sec^{-1}(v)$)
𝑛'(𝑥) = 1 / (|𝑣|√(𝑣² – 1))
Substituting back 𝑣 = 𝑥²:
𝑛'(𝑥) = 1 / (|𝑥²|√((𝑥²)² – 1))
𝑛'(𝑥) = 1 / (|𝑥²|√(𝑥⁴ – 1))
Therefore, the derivative of 𝑛(𝑥) = $sec^{-1}(2𝑥 – 1)$ + $sec^{-1}(𝑥²)$ is 𝑛'(𝑥) = 1 / (|2𝑥 – 1|√((2𝑥 – 1)² – 1)) + 1 / (|𝑥²|√(𝑥⁴ – 1)).
Example 7
Find the derivative of 𝑝(𝑥) = 𝑥 * $sec^{-1}(𝑥)$.
Figure-4.
Solution
To differentiate 𝑝(𝑥), we apply the product rule. Let 𝑓(𝑥) = 𝑥 and 𝑔(𝑥) = $sec^{-1}(x)$. Using the product rule, we have:
𝑝'(𝑥) = 𝑓'(𝑥) * 𝑔(𝑥) + 𝑓(𝑥) * 𝑔'(𝑥)
Differentiating 𝑓(𝑥) = 𝑥, we have 𝑓'(𝑥) = 1.
For 𝑔(𝑥) = $sec^{-1}(x)$, we apply the derivative formula:
𝑔'(𝑥) = 1 / (|𝑥|√(𝑥² – 1))
Combining these results, we have:
𝑝'(𝑥) = 1 * $sec^{-1}(x)$ + 𝑥 * (1 / (|𝑥|√(𝑥² – 1)))
𝑝'(𝑥) = $sec^{-1}(x)$ + 1 / (√(𝑥² – 1))
Thus, the derivative of 𝑝(𝑥) = 𝑥 * $sec^{-1}(x)$ is 𝑝'(𝑥) = $sec^{-1}(x)$ + 1 / (√(𝑥² – 1)).
Applications
The derivative of secant inverse, with its ability to analyze the rate of change of the secant inverse function, finds applications in various fields. Here are some examples of its applications in different areas:
Calculus
The derivative of secant inverse plays a significant role in calculus, particularly in problems involving rates of change. By understanding the behavior of the secant inverse function, one can determine the instantaneous rate of change at a specific point, enabling the solution of optimization problems and related calculus tasks.
Physics
In physics, angular measurements and trigonometric functions are commonly encountered. The derivative of secant inverse allows for the analysis of systems involving angles, such as rotational motion, oscillatory behavior, and wave propagation. By applying the derivative of secant inverse, physicists can determine how these systems change over time and quantify angular velocities and accelerations.
Engineering
Engineers often encounter inverse trigonometric functions in various disciplines, including control systems, robotics, signal processing, and optics. The derivative of secant inverse helps engineers analyze and design systems that involve angles, such as robotic arm movements, stabilization of control systems, and optical lens design.
Mathematics Education
The derivative of secant inverse is an important concept taught in mathematics education, specifically in calculus courses. It helps students understand the behavior of inverse trigonometric functions and their derivatives.
Scientific Research
The derivative of secant inverse is utilized in scientific research that involves the analysis and modeling of data containing angles or angular relationships. It enables researchers to quantify changes in angular quantities, validate experimental data, and derive mathematical models to describe and predict phenomena in various scientific disciplines.
Computer Graphics and Animation
Angles and trigonometric functions are essential for producing realistic movements and visual effects in computer graphics and animation. The derivative of secant inverse helps in determining the rate of change of angles, which influences the smoothness and realism of animations, simulations, and virtual environments.
By applying the derivative of secant inverse in fields such as computer graphics, animation, physics, engineering, and mathematics, mathematicians, scientists, engineers, and educators can analyze, optimize, and model systems involving angles and angular measurements.
It offers a useful tool for comprehending and quantifying the behaviour of inverse trigonometric functions, advancing a variety of mathematical, technological, and scientific fields.
Historical Significance
The concept of the derivative of secant inverse and other inverse trigonometric functions emerged from the development of trigonometry and its applications in mathematics and science. Trigonometry itself has a lengthy and illustrious past, having origins in prehistoric societies.
The Greeks of antiquity, especially Hipparchus (c. 190 – c. 120 BCE) and Ptolemy (c. 90 – c. 168 CE), made significant contributions to trigonometry by studying the relationships between angles and sides of triangles.
They developed tables of chord lengths, which were later transformed into tables of arc lengths. However, it wasn’t until the medieval Islamic mathematicians, such as Al-Battani (c. 858 – c. 929 CE) and Al-Kashi (c. 1380 – 1429 CE), that the inverse trigonometric functions began to take shape.
With the help of mathematicians like Isaac Newton and Gottfried Wilhelm Leibniz, the formal study of derivatives and calculus arose later in the 17th century. Their work provided a systematic framework for understanding rates of change, tangents to curves, and the derivative as a mathematical concept.
As calculus and the study of derivatives progressed, the derivative of inverse trigonometric functions, including the derivative of secant inverse, became part of the mathematical discourse. Mathematicians developed formulas and techniques to differentiate inverse trigonometric functions to solve various problems in calculus and related fields.
All images were created with GeoGebra.